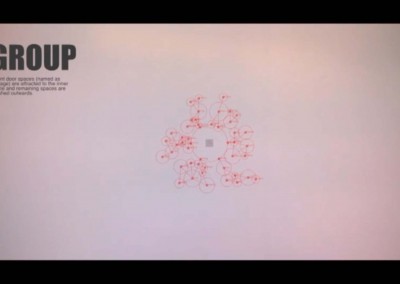
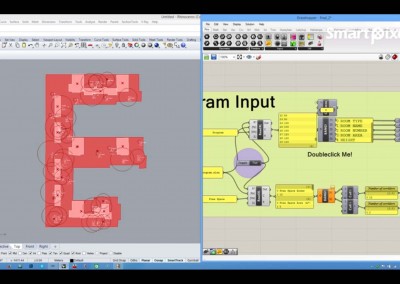
Dieses Projekt beschäftigt sich mit der Grundrissoptimierung bzw. -manipulierung basierend auf dem Konzept der Pfadfindung (tatsächlich zurückzulegende Strecke innerhalb eines Grundrisses). Nach vorangegangener Grundriss- und Graphanalyse mittels Gephi und als darauffolgenden Schritt des Transfers in Grasshopper und Rhino, können bestimmte Bedingungen automatisiert entwickelt werden. So können leicht die Bedingungen getestet werden, zwei Räume nebeneinander zu positionieren oder eine Durchwegung möglichst kurz zu halten. Über Galapagos werden nach dem Prinzip der evolutionären Optimierung Pfade ermittelt, aus denen sich ein optimaler Voronoi-Zellen-Plan bilden lässt. Dieser wird in einem letzten Schritt wieder in einen – hinsichtlich der Wegedistanzen optimierten – orthogonalen Grundriss übersetzt.